As mentioned in the previous post, here is the algebra qual with my solutions. To be honest, this is one of the easiest quals I’ve seen from them. The scores were quite high; I scored 24 out of 25 and there were a couple of perfect scores. I think my only mistake came on problem 5(a), I gave a pretty hand wavy argument. Oh well…
1. Let  be a group.
be a group.
(a) Let  be defined by
be defined by  for all
for all  . Prove that
. Prove that  is a homomorphism if and only if is abelian.
is a homomorphism if and only if is abelian.
Proof. Suppose that is a homomorphism. Let  . Then
. Then  . Also,
. Also,  . Thus,
. Thus,  . Multiplying on the left by
. Multiplying on the left by  and on the right by
and on the right by  we have that
we have that  .
.
Conversely, suppose that is abelian. Let . Then  . Where the second equality holds because
. Where the second equality holds because  and
and  commute.
commute. 
(b) If is abelian and finite, show that is an automorphism if and only if has odd order.
Proof. Suppose that is an automorphism. Seeking a contradiction assume that does not have odd order. Then  is a prime which divides
is a prime which divides  , so by Cauchy’s theorem, has an element of order . Let be this element. Then
, so by Cauchy’s theorem, has an element of order . Let be this element. Then  , so is a nontrivial element in the kernel of . This, of course, is a contradiction because is injective and so
, so is a nontrivial element in the kernel of . This, of course, is a contradiction because is injective and so  must be the only element in the kernel of .
must be the only element in the kernel of .
Conversely, suppose that has odd order. Since is abelian, by part (a) we know that is a homomorphism. Moreover, because and  , being injective will imply being surjective. Thus, it suffices to show that is injective. We do this by showing that the kernel of is trivial. Suppose that is in the kernel of . Then . Thus
, being injective will imply being surjective. Thus, it suffices to show that is injective. We do this by showing that the kernel of is trivial. Suppose that is in the kernel of . Then . Thus  must be
must be  or . But, the order of must divide the order of . Since has odd order,
or . But, the order of must divide the order of . Since has odd order,  so
so  . Thus, the kernel of is trivial.
. Thus, the kernel of is trivial.
2. Let be a group and let  . Prove: If
. Prove: If  is a subgroup of and
is a subgroup of and  , then is a normal subgroup of .
, then is a normal subgroup of .
Proof. Let and  . We are given that is a subgroup so
. We are given that is a subgroup so  exists and it suffices to show that is normal. We have that
exists and it suffices to show that is normal. We have that  . But
. But  so
so  for some
for some  . Thus,
. Thus,  because is closed.
because is closed.
3. Prove that in an integral domain  every prime element is an irreducible.
every prime element is an irreducible.
Proof. Let  be a prime element of . Then the ideal generated by ,
be a prime element of . Then the ideal generated by ,  , is a prime ideal. Suppose that
, is a prime ideal. Suppose that  . Then
. Then  and so
and so  or
or  . Thus,
. Thus,  or
or  for some
for some  . By cancellation in an integral domain we see that
. By cancellation in an integral domain we see that  or
or  . In either case
. In either case  is a unit or
is a unit or  is a unit which means that is an irreducible.
is a unit which means that is an irreducible.
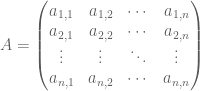
4. Find necessary and sufficient conditions on  such that the matrix
such that the matrix

is diagonalizable over  .
.
Solution. Recall, an  matrix is diagonalizable if and only if the sum of the dimensions of the eigenspaces is equal to
matrix is diagonalizable if and only if the sum of the dimensions of the eigenspaces is equal to  . Let
. Let

First, we find the eigenvalues of  . Computing the characteristic polynomial of , we obtain
. Computing the characteristic polynomial of , we obtain  . The eigenvalues of are then
. The eigenvalues of are then  and
and  .
.
Next we find the corresponding eigenspaces.
For we solve the system given by  and get that
and get that  and
and  . Thus,
. Thus,

is a basis for the eigenspace corresponding to .
For we solve the system given by  and get that
and get that  is free,
is free,  , and
, and  .
.
If then  and
and

would be our basis for the eigenspace corresponding to . In this case, would not be diagonalizable.
If  then
then
would be our basis for the eigenspace corresponding to . In this case, would be diagonalizable.
In conclusion, is diagonalizable if and only if .
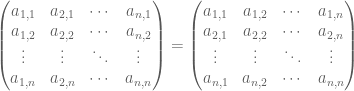
5. Let  be the vector space of matrices with entries in and let
be the vector space of matrices with entries in and let  and
and  denote the set of real symmetric and skew-symmetric matrices, respectively.
denote the set of real symmetric and skew-symmetric matrices, respectively.
(a) Show that the dimension of is  . A brief justification is sufficient.
. A brief justification is sufficient.
Proof. Let
be an element of . Then
 .
.
Thus,


…and so on. By counting, we see that there must be elements in our basis for .
(b) Let  be the linear transformation defined by
be the linear transformation defined by  for all
for all  . Prove that
. Prove that  and
and  .
.
Proof. First we show that . Let  . Then
. Then  and so
and so  . Thus,
. Thus,  . Now, let . Then and so
. Now, let . Then and so  . Thus, .
. Thus, .
Next we show that  . Let
. Let  . Then there exists
. Then there exists  such that
such that  . This implies that
. This implies that  and so
and so  . Now, let . Then and so
. Now, let . Then and so  . Thus, .
. Thus, .
(c) Compute the dimension of .
Solution. By the rank nullity theorem we have that
 .
.
In particular,
 .
.
Thus,  .
.


Leave a comment
Comments feed for this article